1.5 Representaciones
aproximadas
Las representaciones consideradas hasta este momento en esta sección eran todas exactas, i.e., determinan completamente la partición dada de S. En los párrafos siguientes discutiremos métodos para obtener aproximaciones a una partición basadas en estas representaciones. De nuevo aquí, por simplicidad, asumiremos normalmente que la partición consiste en un conjunto S y su complementario.
Debe señalarse que las representaciones de un conjunto S consideradas en este capítulo son bastantes sensibles al ruido. Por ejemplo, si hacemos un diminuto agujero en S, sus diversos tipos de representaciones de bloques maximales pueden cambiar sustancialmente (ver Fig. 5), y también adquiere un nuevo borde. Para minimizar este problema, puede limpiarse de ruido la imagen antes de segmentarla; se puede limpiar S mediante un procedimiento de encogimiento y expansión (ver Sección 3.2d); o se pueden utilizar representaciones aproximadas de S, que serían menos sensibles a la presencia de ruido.

Fig.
5 Efectos del ruido en la
representación MAT: un simple objeto (a) y dos versiones de ruido (b) y (c), con
centros de los bloques MAT subrayados.
a.
Matrices
El método más simple de aproximación es una simple reducción de la resolución. Podemos reducir la resolución de una imagen re-muestreándola de una forma más tosca; esto es equivalente a la disminución digital. Podemos disminuir S, obteniendo S’, y entonces segmentar S’ de la misma forma que segmentábamos S; o bien, podemos disminuir S segmentada (i.e., cS ). Nótese que en S’ cada nivel de gris es (en general) una media ponderada de un bloque de niveles grises de S; así si disminuimos cS , el resultado puede no seguir siendo binario, pero podemos hacerlo binario de nuevo mediante thresholding (tomando umbrales). Si se desea, podemos volver a aumentar para hacer la imagen simplificada del mismo tamaño que la original con motivos de presentación.
No vamos a estudiar aquí las ventajas de usar imágenes con resolución reducida para obtener información preliminar sobre las partes de S a analizar. Una “pirámide” de reducciones sucesivas, e.g., cada mitad de la precedente (n a n, n/2 a n/2, n/4 a n/4, ...) proporciona una amplio rango de resoluciones, al menos una de las cuales debería ser adecuada para cualquier propósito deseado. El espacio total de almacenamiento requerido para esta pirámide es menor que 11/3 veces que el requerido para S solo (1 + ¼ + (1/4)2 + ... = 11/3).
Existen otros tipos de aproximación de imágenes, que no implican resolución reducida, en conexión con el particionado de imágenes.
b.
Bloques
Cuando S se representa mediante bloques maximales (o secuencias, etc.) podemos simplificarlo eliminando alguno de los bloques. Por ejemplo, si eliminamos pequeños bloques del MAT, mantenemos las principales características de S y perdemos sólo algunos de los detalles (ver Fig. 6). Un método relacionado para simplificar S por encogimiento o expansión será discutido en la sección 3.2d. Eliminar nodos de bajo nivel de una representación de un árbol de cuadrados puede resultar en una simplificación sustancial, puesto que puede conducir a la eliminación de nodos de niveles superiores.
Otra posibilidad es usar una representación basada en bloques cuyos valores son sólo aproximadamente constantes (e.g., que tengan varianzas inferiores a algún umbral). Para generalizar el MAT[1], consideramos el conjunto de cuadrados centrado en cada punto P, y sea SP tal que todos los cuadrados más pequeños tengan varianzas menores que el umbral, mientras que el siguiente cuadrado más grande no. En la Fig. 7 están ilustrados bloques maximales definidos de esta forma. Las otras representaciones de bloques maximales (secuencias, árboles) se pueden generalizar análogamente.
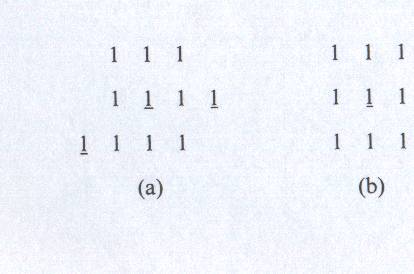
Fig. 6 Simplificación
eliminando los bloques pequeños de MAT. (a) Objeto, con los centros del MAT
subrayado. (b) Objeto simplificado resultante de ignorar los bloques de radio
.
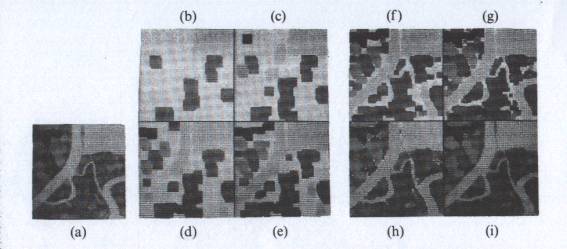
Fig. 7
Aproximaciones a la imagen mediante bloques maximales de baja varianza.
(a) Imagen; (b)-(i)bloques de radios 7, 7 y 6, 7 y 6 y 5, ..., 7 y 7 y ... y 0,
mostradas con sus principales niveles de grises. Cuando bloques de diferentes
radios se solapan, el nivel principal de gris del bloque más pequeño es el que
se usa; cuando se solapan bloques de iguales radios, se usa el máximo de sus
niveles de grises.
Si S no tiene demasiado ruido, los puntos de su MAT (abreviando: su eje medio, MA) tenderán a encontrarse a lo largo de un conjunto de arcos y curvas. De este modo podemos representar S, al menos aproximadamente, especificando esas curvas (e.g., mediante códigos de cadena) y definiendo una “función radio” a lo largo de cada curva [7]. Esto define un conjunto de “lazos generalizados”(i.e., lazos curvados arbitrariamente de anchura variable) cuya unión es S. Desafortunadamente, encontrar un conjunto simple de curvas que contengan el MA no es algo obvio; ver Sección 2.1a.
c. Bordes y
curvas
Las bordes pueden ser aproximados mediante polígonos (o, análogamente, usando trozos de curvas de mayor orden) de varias formas. Algunos métodos simples para construir y refinar aproximaciones poligonales a un borde o curva son descritos brevemente en la Sección 3.3c.
Dado un conjunto de aproximaciones sucesivas a un borde, estas aproximaciones definen una estructura en árbol en la que cada nodo representa un lado del polígono, y los hijos de un nodo son sus refinamientos inmediatos; las caras del polígono más desigual son los hijos del nodo raíz. Si lo deseamos, podemos asociar con cada cara del polígono una tira rectangular que contenga justo el arco, estas tiras definen la zona en la que la borde podría encontrarse [5].
Un dibujo de líneas es una imagen que puede ser dividida en un conjunto de subconjuntos alargados en todas direcciones y un fondo (background). (Esta es una definición bastante imprecisa; la elongación será definida de forma más precisa en la Sección 3.4b.) En este caso los propios subconjuntos pueden ser aproximados mediante uniones de arcos y curvas; este es un caso especial de la representación de “lazo generalizado” en la que la función radio es constante (o constante a trozos, si las líneas tienen diferente grosor). Los procesos de “adelgazamiento” que reducen regiones elongadas a uniones de arcos y curvas serán descritos en la Sección 2.3. Estas uniones pueden entonces ser separadas además en arcos y curvas individuales separándolas por las uniones, y las curvas individuales pueden ser representadas mediante códigos de cadena. ( Los códigos de fisura no son apropiados aquí, ya que estamos representando una curva de un píxel de grosor, no una región de borde; sin embargo, los códigos de cadena son aplicables, puesto que los puntos sucesivos en una curva son vecinos) De forma alternativa, las curvas pueden ser aproximadas mediante polígonos (etc.), como más arriba se ha indicado; o uno puede usar códigos de cadena generalizados basados en movimientos de vecino a vecino en los que está permitida una mayor vecindad.